Understanding Modern GPU Architecture and Parallel Computing
A comprehensive exploration of modern GPU architecture and parallel computing principles, covering SIMD processing, memory hierarchies, and programming models for high-performance computing.

Introduction
Modern graphics processing units (GPUs) represent one of the most fascinating achievements in computer architecture. These devices can perform upwards of 36 trillion calculations per second - a scale so massive that it would require the population of 4,400 Earths working continuously to match this computational power. This article provides a deep technical analysis of GPU architecture, parallel computing paradigms, and practical implementations for leveraging this incredible processing power.
GPU vs CPU Architecture
Architectural Differences
The fundamental distinction between GPUs and CPUs lies in their architectural approach to computation:
- Core Count and Specialization
- GPUs: 10,000+ specialized cores optimized for parallel processing
- CPUs: 8-24 complex cores optimized for sequential processing and task switching
- Processing Paradigm
- GPUs: Single Instruction, Multiple Data (SIMD) / Single Instruction, Multiple Threads (SIMT)
- CPUs: Complex instruction set with branch prediction and out-of-order execution
- Memory Architecture
GPUs: High-bandwidth memory with massive throughput (1.15 TB/s)
CPUs: Lower bandwidth but more flexible memory hierarchy (64 GB/s)


The Cargo Ship Analogy
Think of a GPU as a massive cargo ship and a CPU as a jumbo jet:
- GPU (Cargo Ship):
- Huge cargo capacity (parallel processing)
- Limited flexibility in routes (specialized instructions)
- Slower but more efficient for bulk operations
- CPU (Jumbo Jet):
- Smaller cargo capacity (sequential processing)
- Highly flexible routing (general-purpose computing)
- Faster for individual operations
Physical Architecture of Modern GPUs
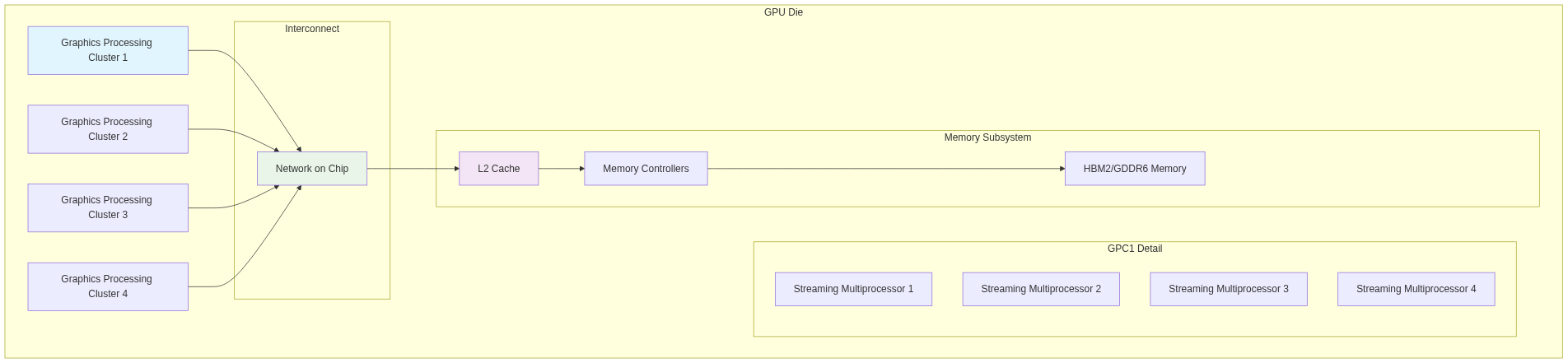
Hierarchical Organization
Modern GPUs follow a hierarchical organization:
- Graphics Processing Clusters (GPCs)
- Top-level organizational unit
- Contains multiple Streaming Multiprocessors (SMs)
- Streaming Multiprocessors (SMs)
- Contains multiple warps and specialized cores
- Includes shared memory and L1 cache
- Warps
- Group of 32 threads executed simultaneously
- Basic unit of thread execution
- Core Types
- CUDA Cores: Basic arithmetic operations
- Tensor Cores: Matrix operations
- RT Cores: Ray tracing calculations
Implementation Example
Let’s implement a simple program that demonstrates the concept of parallel processing using OpenMP as an analogy for GPU processing:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
#include <stdio.h>
#include <stdlib.h>
#include <omp.h>
#include <time.h>
#define ARRAY_SIZE 1000000
#define NUM_THREADS 8
void parallel_array_operation(float* input, float* output, int size) {
#pragma omp parallel num_threads(NUM_THREADS)
{
int thread_id = omp_get_thread_num();
int chunk_size = size / NUM_THREADS;
int start = thread_id * chunk_size;
int end = (thread_id == NUM_THREADS - 1) ? size : start + chunk_size;
// Simulate GPU-like parallel processing
for (int i = start; i < end; i++) {
// Simple arithmetic operation
output[i] = input[i] * 2.0f + 1.0f;
}
}
}
int main() {
float *input = (float*)malloc(ARRAY_SIZE * sizeof(float));
float *output = (float*)malloc(ARRAY_SIZE * sizeof(float));
// Initialize input array
srand(time(NULL));
for (int i = 0; i < ARRAY_SIZE; i++) {
input[i] = (float)rand() / RAND_MAX;
}
// Measure execution time
double start_time = omp_get_wtime();
parallel_array_operation(input, output, ARRAY_SIZE);
double end_time = omp_get_wtime();
printf("Execution time: %f seconds\n", end_time - start_time);
printf("First 5 results: %f %f %f %f %f\n",
output[0], output[1], output[2], output[3], output[4]);
free(input);
free(output);
return 0;
}
To compile and run this code:
1
2
gcc -fopenmp parallel_processing.c -o parallel_processing
./parallel_processing
The assembly output for the critical section (using gcc -S):
.L3:
movss (%rdi,%rax,4), %xmm0 # Load input value
mulss .LC0(%rip), %xmm0 # Multiply by 2.0
addss .LC1(%rip), %xmm0 # Add 1.0
movss %xmm0, (%rsi,%rax,4) # Store result
addq $1, %rax # Increment counter
cmpq %rdx, %rax # Compare with end
jl .L3 # Loop if not done
Computational Architecture and SIMD/SIMT
SIMD vs SIMT Architecture
SIMD (Single Instruction, Multiple Data)
- Traditional parallel processing model
- All threads execute exactly the same instruction
- Lock-step execution
- Limited flexibility with branching
SIMT (Single Instruction, Multiple Threads)
- Modern GPU architecture
- Threads can diverge and reconverge
- Individual program counters
- Better handling of conditional code
Let’s implement a SIMT-like operation in C:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <time.h>
#define WARP_SIZE 32
#define NUM_WARPS 4
#define TOTAL_THREADS (WARP_SIZE * NUM_WARPS)
typedef struct {
int thread_id;
float* input;
float* output;
int size;
} ThreadData;
void* simt_thread(void* arg) {
ThreadData* data = (ThreadData*)arg;
int tid = data->thread_id;
int stride = TOTAL_THREADS;
// Simulate SIMT execution with divergent paths
for (int i = tid; i < data->size; i += stride) {
if (data->input[i] > 0.5f) {
// Branch 1: Square the value
data->output[i] = data->input[i] * data->input[i];
} else {
// Branch 2: Double the value
data->output[i] = data->input[i] * 2.0f;
}
}
return NULL;
}
int main() {
const int size = 1024;
float* input = (float*)malloc(size * sizeof(float));
float* output = (float*)malloc(size * sizeof(float));
pthread_t threads[TOTAL_THREADS];
ThreadData thread_data[TOTAL_THREADS];
// Initialize input array
srand(time(NULL));
for (int i = 0; i < size; i++) {
input[i] = (float)rand() / RAND_MAX;
}
// Create threads
for (int i = 0; i < TOTAL_THREADS; i++) {
thread_data[i].thread_id = i;
thread_data[i].input = input;
thread_data[i].output = output;
thread_data[i].size = size;
pthread_create(&threads[i], NULL, simt_thread, &thread_data[i]);
}
// Join threads
for (int i = 0; i < TOTAL_THREADS; i++) {
pthread_join(threads[i], NULL);
}
// Print sample results
printf("Sample results:\n");
for (int i = 0; i < 5; i++) {
printf("Input: %.4f, Output: %.4f\n", input[i], output[i]);
}
free(input);
free(output);
return 0;
}
Memory Hierarchy and Data Transfer
Graphics Memory Architecture
Modern GPUs use sophisticated memory hierarchies:
- GDDR6X Memory
- High bandwidth (1.15 TB/s)
- Multiple voltage levels for encoding
- PAM3 signaling
- Memory Controllers
- Wide memory bus (384-bit)
- Multiple memory channels
- Sophisticated error correction
Let’s implement a memory transfer simulation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
#define CACHE_LINE_SIZE 64
#define L1_CACHE_SIZE (64 * 1024) // 64KB L1 Cache
#define L2_CACHE_SIZE (6 * 1024 * 1024) // 6MB L2 Cache
typedef struct {
unsigned char data[CACHE_LINE_SIZE];
int valid;
unsigned long tag;
} CacheLine;
typedef struct {
CacheLine* lines;
int size;
} Cache;
Cache* create_cache(int size) {
Cache* cache = (Cache*)malloc(sizeof(Cache));
cache->size = size / CACHE_LINE_SIZE;
cache->lines = (CacheLine*)calloc(cache->size, sizeof(CacheLine));
return cache;
}
int simulate_memory_access(Cache* l1_cache, Cache* l2_cache, unsigned long address) {
int l1_index = (address / CACHE_LINE_SIZE) % l1_cache->size;
int l2_index = (address / CACHE_LINE_SIZE) % l2_cache->size;
unsigned long tag = address / CACHE_LINE_SIZE;
// Check L1 Cache
if (l1_cache->lines[l1_index].valid &&
l1_cache->lines[l1_index].tag == tag) {
return 1; // L1 Cache hit
}
// Check L2 Cache
if (l2_cache->lines[l2_index].valid &&
l2_cache->lines[l2_index].tag == tag) {
// L2 Cache hit, copy to L1
l1_cache->lines[l1_index].valid = 1;
l1_cache->lines[l1_index].tag = tag;
memcpy(l1_cache->lines[l1_index].data,
l2_cache->lines[l2_index].data,
CACHE_LINE_SIZE);
return 2; // L2 Cache hit
}
// Cache miss, load from main memory
l2_cache->lines[l2_index].valid = 1;
l2_cache->lines[l2_index].tag = tag;
// Simulate memory load
for (int i = 0; i < CACHE_LINE_SIZE; i++) {
l2_cache->lines[l2_index].data[i] = rand() % 256;
}
// Copy to L1
l1_cache->lines[l1_index].valid = 1;
l1_cache->lines[l1_index].tag = tag;
memcpy(l1_cache->lines[l1_index].data,
l2_cache->lines[l2_index].data,
CACHE_LINE_SIZE);
return 3; // Cache miss
}
int main() {
Cache* l1_cache = create_cache(L1_CACHE_SIZE);
Cache* l2_cache = create_cache(L2_CACHE_SIZE);
srand(time(NULL));
// Simulate memory accesses
int num_accesses = 1000000;
int l1_hits = 0, l2_hits = 0, misses = 0;
for (int i = 0; i < num_accesses; i++) {
unsigned long address = rand() % (1ULL << 32); // 32-bit address space
int result = simulate_memory_access(l1_cache, l2_cache, address);
switch(result) {
case 1: l1_hits++; break;
case 2: l2_hits++; break;
case 3: misses++; break;
}
}
printf("Memory Access Statistics:\n");
printf("L1 Cache Hits: %d (%.2f%%)\n",
l1_hits, (float)l1_hits/num_accesses*100);
printf("L2 Cache Hits: %d (%.2f%%)\n",
l2_hits, (float)l2_hits/num_accesses*100);
printf("Cache Misses: %d (%.2f%%)\n",
misses, (float)misses/num_accesses*100);
free(l1_cache->lines);
free(l1_cache);
free(l2_cache->lines);
free(l2_cache);
return 0;
}
Practical Implementation in C
Understanding GPU architecture is valuable, but let’s also explore how to write code that effectively utilizes these architectural features:
CUDA Programming Example
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
#include <cuda_runtime.h>
#include <stdio.h>
// CUDA kernel for vector addition
__global__ void vectorAdd(float *a, float *b, float *c, int n) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < n) {
c[idx] = a[idx] + b[idx];
}
}
// Host function
int main() {
int n = 1024;
size_t size = n * sizeof(float);
// Allocate host memory
float *h_a = (float*)malloc(size);
float *h_b = (float*)malloc(size);
float *h_c = (float*)malloc(size);
// Initialize input arrays
for (int i = 0; i < n; i++) {
h_a[i] = i;
h_b[i] = i * 2;
}
// Allocate device memory
float *d_a, *d_b, *d_c;
cudaMalloc(&d_a, size);
cudaMalloc(&d_b, size);
cudaMalloc(&d_c, size);
// Copy data to device
cudaMemcpy(d_a, h_a, size, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, h_b, size, cudaMemcpyHostToDevice);
// Launch kernel
int threadsPerBlock = 256;
int blocksPerGrid = (n + threadsPerBlock - 1) / threadsPerBlock;
vectorAdd<<<blocksPerGrid, threadsPerBlock>>>(d_a, d_b, d_c, n);
// Copy result back to host
cudaMemcpy(h_c, d_c, size, cudaMemcpyDeviceToHost);
// Verify result
for (int i = 0; i < 10; i++) {
printf("c[%d] = %.2f\n", i, h_c[i]);
}
// Free memory
free(h_a); free(h_b); free(h_c);
cudaFree(d_a); cudaFree(d_b); cudaFree(d_c);
return 0;
}
OpenCL Example
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
#include <CL/cl.h>
#include <stdio.h>
#include <stdlib.h>
const char* kernelSource =
"__kernel void vectorAdd(__global float* a, __global float* b, __global float* c, int n) {\n"
" int idx = get_global_id(0);\n"
" if (idx < n) {\n"
" c[idx] = a[idx] + b[idx];\n"
" }\n"
"}\n";
int main() {
// Platform and device setup
cl_platform_id platform;
cl_device_id device;
cl_context context;
cl_command_queue queue;
cl_program program;
cl_kernel kernel;
// Get platform and device
clGetPlatformIDs(1, &platform, NULL);
clGetDeviceIDs(platform, CL_DEVICE_TYPE_GPU, 1, &device, NULL);
// Create context and command queue
context = clCreateContext(NULL, 1, &device, NULL, NULL, NULL);
queue = clCreateCommandQueue(context, device, 0, NULL);
// Create program and kernel
program = clCreateProgramWithSource(context, 1, &kernelSource, NULL, NULL);
clBuildProgram(program, 1, &device, NULL, NULL, NULL);
kernel = clCreateKernel(program, "vectorAdd", NULL);
// Buffer creation and kernel execution would follow...
return 0;
}
Advanced Topics
Tensor Cores and Matrix Operations
Tensor cores are specialized processing units designed for matrix multiplication and addition operations. Here’s a simple matrix multiplication implementation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#include <omp.h>
#define MATRIX_SIZE 1024
#define BLOCK_SIZE 32
void tensor_core_simulation(float* A, float* B, float* C, float* D,
int M, int N, int K) {
#pragma omp parallel for collapse(2)
for (int i = 0; i < M; i += BLOCK_SIZE) {
for (int j = 0; j < N; j += BLOCK_SIZE) {
float temp[BLOCK_SIZE][BLOCK_SIZE] = {0};
// Matrix multiplication in blocks
for (int k = 0; k < K; k += BLOCK_SIZE) {
for (int bi = 0; bi < BLOCK_SIZE; bi++) {
for (int bj = 0; bj < BLOCK_SIZE; bj++) {
float sum = 0.0f;
for (int bk = 0; bk < BLOCK_SIZE; bk++) {
sum += A[(i+bi)*K + (k+bk)] *
B[(k+bk)*N + (j+bj)];
}
temp[bi][bj] += sum;
}
}
}
// Add bias and store result
for (int bi = 0; bi < BLOCK_SIZE; bi++) {
for (int bj = 0; bj < BLOCK_SIZE; bj++) {
D[(i+bi)*N + (j+bj)] =
temp[bi][bj] + C[(i+bi)*N + (j+bj)];
}
}
}
}
}
}
int main() {
float *A, *B, *C, *D;
// Allocate matrices
A = (float*)malloc(MATRIX_SIZE * MATRIX_SIZE * sizeof(float));
B = (float*)malloc(MATRIX_SIZE * MATRIX_SIZE * sizeof(float));
C = (float*)malloc(MATRIX_SIZE * MATRIX_SIZE * sizeof(float));
D = (float*)malloc(MATRIX_SIZE * MATRIX_SIZE * sizeof(float));
// Initialize matrices with random values
srand(time(NULL));
for (int i = 0; i < MATRIX_SIZE * MATRIX_SIZE; i++) {
A[i] = (float)rand() / RAND_MAX;
B[i] = (float)rand() / RAND_MAX;
C[i] = (float)rand() / RAND_MAX;
}
// Measure execution time
double start_time = omp_get_wtime();
tensor_core_simulation(A, B, C, D, MATRIX_SIZE, MATRIX_SIZE, MATRIX_SIZE);
double end_time = omp_get_wtime();
printf("Matrix multiplication completed in %.3f seconds\n",
end_time - start_time);
// Print sample results
printf("Sample output (top-left 2x2 corner):\n");
for (int i = 0; i < 2; i++) {
for (int j = 0; j < 2; j++) {
printf("%.4f ", D[i * MATRIX_SIZE + j]);
}
printf("\n");
}
free(A);
free(B);
free(C);
free(D);
return 0;
}
Ray Tracing Cores
Ray tracing cores handle complex intersection calculations for real-time ray tracing. Here’s a simplified ray-triangle intersection implementation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <omp.h>
typedef struct {
float x, y, z;
} Vector3;
typedef struct {
Vector3 origin;
Vector3 direction;
} Ray;
typedef struct {
Vector3 v0, v1, v2;
} Triangle;
Vector3 subtract(Vector3 a, Vector3 b) {
Vector3 result = {
a.x - b.x,
a.y - b.y,
a.z - b.z
};
return result;
}
Vector3 cross(Vector3 a, Vector3 b) {
Vector3 result = {
a.y * b.z - a.z * b.y,
a.z * b.x - a.x * b.z,
a.x * b.y - a.y * b.x
};
return result;
}
float dot(Vector3 a, Vector3 b) {
return a.x * b.x + a.y * b.y + a.z * b.z;
}
// Möller–Trumbore intersection algorithm
int ray_triangle_intersection(Ray ray, Triangle triangle, float* t) {
const float EPSILON = 0.0000001;
Vector3 edge1 = subtract(triangle.v1, triangle.v0);
Vector3 edge2 = subtract(triangle.v2, triangle.v0);
Vector3 h = cross(ray.direction, edge2);
float a = dot(edge1, h);
if (a > -EPSILON && a < EPSILON)
return 0; // Ray is parallel to triangle
float f = 1.0 / a;
Vector3 s = subtract(ray.origin, triangle.v0);
float u = f * dot(s, h);
if (u < 0.0 || u > 1.0)
return 0;
Vector3 q = cross(s, edge1);
float v = f * dot(ray.direction, q);
if (v < 0.0 || u + v > 1.0)
return 0;
*t = f * dot(edge2, q);
return *t > EPSILON;
}
int main() {
const int NUM_RAYS = 1000000;
const int NUM_TRIANGLES = 1000;
// Create sample rays and triangles
Ray* rays = (Ray*)malloc(NUM_RAYS * sizeof(Ray));
Triangle* triangles = (Triangle*)malloc(NUM_TRIANGLES * sizeof(Triangle));
// Initialize random rays and triangles
srand(time(NULL));
for (int i = 0; i < NUM_RAYS; i++) {
rays[i].origin = (Vector3){
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX
};
rays[i].direction = (Vector3){
(float)rand() / RAND_MAX - 0.5f,
(float)rand() / RAND_MAX - 0.5f,
(float)rand() / RAND_MAX - 0.5f
};
}
for (int i = 0; i < NUM_TRIANGLES; i++) {
triangles[i].v0 = (Vector3){
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX
};
triangles[i].v1 = (Vector3){
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX
};
triangles[i].v2 = (Vector3){
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX,
(float)rand() / RAND_MAX
};
}
// Perform intersection tests
int total_intersections = 0;
double start_time = omp_get_wtime();
#pragma omp parallel for reduction(+:total_intersections)
for (int i = 0; i < NUM_RAYS; i++) {
for (int j = 0; j < NUM_TRIANGLES; j++) {
float t;
if (ray_triangle_intersection(rays[i], triangles[j], &t)) {
total_intersections++;
}
}
}
double end_time = omp_get_wtime();
printf("Processed %d ray-triangle intersections\n",
NUM_RAYS * NUM_TRIANGLES);
printf("Found %d intersections\n", total_intersections);
printf("Time taken: %.3f seconds\n", end_time - start_time);
free(rays);
free(triangles);
return 0;
}
Visualization of Architecture
To better understand GPU architecture, here’s a visual representation of the key components:
SM (Streaming Multiprocessor) Internal Architecture
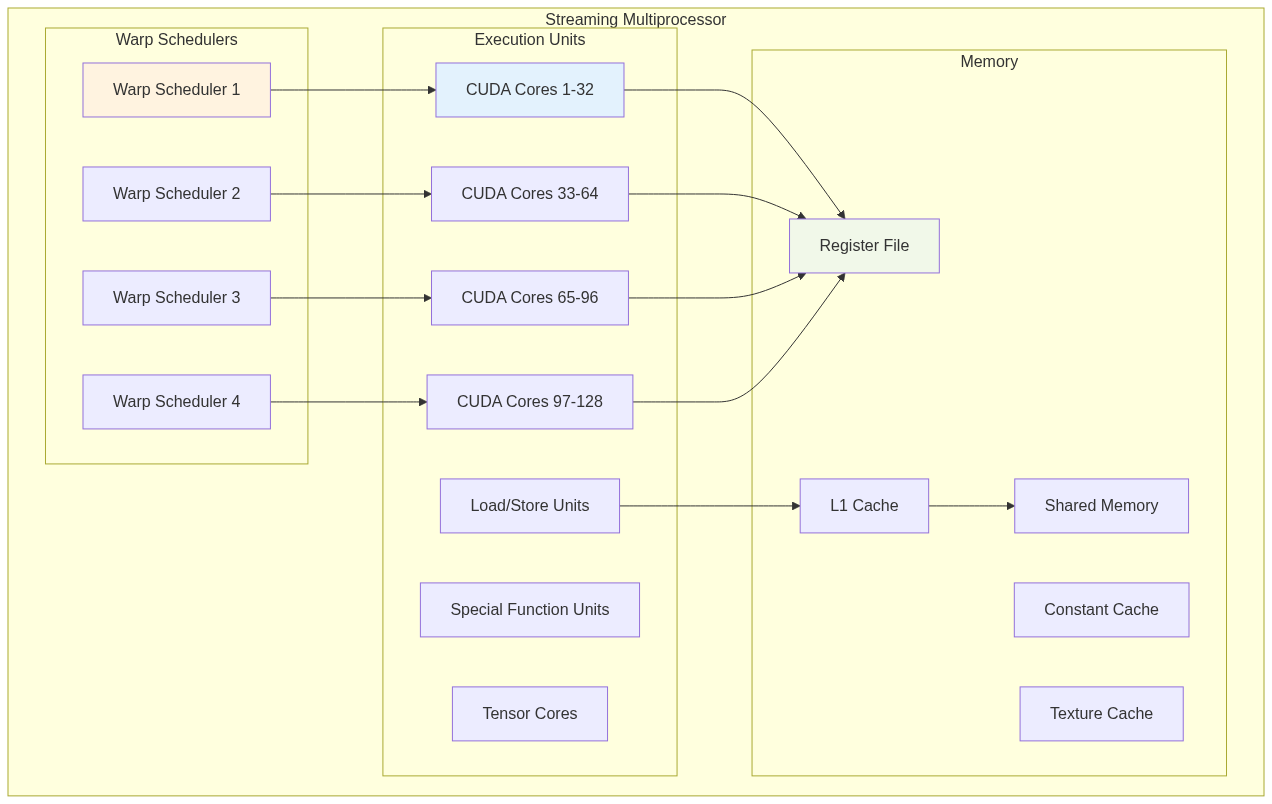
This visualization shows how the hierarchical organization enables massive parallelism while maintaining efficient data flow and resource utilization.
Further Reading
For deeper understanding of GPU architecture and parallel computing:
- NVIDIA CUDA Programming Guide
- “GPU Gems” series by NVIDIA
- “Heterogeneous Computing with OpenCL” by Gaster et al.
- “Programming Massively Parallel Processors” by Kirk and Hwu
- “Real-Time Rendering” by Akenine-Möller et al.
Conclusion
Modern GPU architecture represents a fascinating convergence of parallel processing capabilities, sophisticated memory hierarchies, and specialized computational units. Through our detailed exploration of physical architecture, computational models, and practical implementations, we’ve seen how GPUs achieve their remarkable performance in specific workloads.
Key takeaways:
- GPUs excel at parallel processing through their SIMD/SIMT architecture.
- Memory hierarchy and bandwidth are crucial for GPU performance.
- Specialized cores (Tensor, RT) enable efficient handling of specific computations.
- Modern GPU architecture continues to evolve, particularly in areas like AI and ray tracing.
The future of GPU architecture promises even more exciting developments, particularly in areas like real-time ray tracing, AI acceleration, and general-purpose computing. Understanding these fundamentals provides a solid foundation for leveraging these powerful processors in various applications, from gaming to scientific computing.