Day 08: Thread Creation and Management - POSIX Threads Implementation
Table of Contents
- Introduction
- POSIX Threads (Pthreads) Overview
- Core Concepts
- API Components
- Thread Creation and Initialization
- Thread Attributes
- Creation Parameters
- Thread Management Operations
- Joining Threads
- Detaching Threads
- Thread Cancellation
- Thread Synchronization Primitives
- Mutexes
- Condition Variables
- Barriers
- Semaphores
- Thread-Local Storage
- Advanced Thread Management
- Thread Scheduling
- Priority Management
- Comprehensive Code Examples
- Common Pitfalls and Best Practices
- Performance Optimization
- Sequence Diagram
- Further Reading
- Conclusion
- References
1. Introduction
POSIX Threads (Pthreads) is a standardized programming interface for thread creation and synchronization. This article provides an in-depth look at implementing and managing threads using the Pthreads API, with practical examples and best practices.
2. POSIX Threads Overview
Core Concepts
- Thread ID (pthread_t)
- Thread attributes (pthread_attr_t)
- Synchronization objects
- Thread-local storage
API Components
#include <pthread.h>
// Core threading functions
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
int pthread_join(pthread_t thread, void **retval);
int pthread_exit(void *retval);
3. Thread Creation and Initialization
Thread Attributes
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
void* thread_function(void* arg) {
printf("Thread executing with argument: %d\n", *(int*)arg);
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
int arg = 42;
// Initialize attributes
pthread_attr_init(&attr);
// Set stack size (1MB)
pthread_attr_setstacksize(&attr, 1024 * 1024);
// Set detach state
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_JOINABLE);
// Create thread with attributes
if (pthread_create(&thread, &attr, thread_function, &arg) != 0) {
perror("Thread creation failed");
exit(1);
}
// Clean up attributes
pthread_attr_destroy(&attr);
// Wait for thread completion
pthread_join(thread, NULL);
return 0;
}
Creation Parameters
Detailed example of thread creation with various parameters:
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
typedef struct {
int thread_id;
char* message;
int sleep_time;
} thread_params_t;
void* parameterized_thread(void* arg) {
thread_params_t* params = (thread_params_t*)arg;
printf("Thread %d starting with message: %s\n",
params->thread_id, params->message);
sleep(params->sleep_time);
printf("Thread %d finishing\n", params->thread_id);
pthread_exit(NULL);
}
int main() {
pthread_t threads[3];
thread_params_t params[3] = {
{1, "First Thread", 2},
{2, "Second Thread", 3},
{3, "Third Thread", 1}
};
for (int i = 0; i < 3; i++) {
if (pthread_create(&threads[i], NULL, parameterized_thread, ¶ms[i]) != 0) {
perror("Thread creation failed");
exit(1);
}
}
for (int i = 0; i < 3; i++) {
pthread_join(threads[i], NULL);
}
return 0;
}
4. Thread Management Operations
Joining Threads
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
void* return_value_thread(void* arg) {
int* result = malloc(sizeof(int));
*result = 42;
return (void*)result;
}
int main() {
pthread_t thread;
void* result;
pthread_create(&thread, NULL, return_value_thread, NULL);
// Wait for thread and get return value
pthread_join(thread, &result);
printf("Thread returned: %d\n", *(int*)result);
free(result);
return 0;
}
Detaching Threads
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
void* detached_thread(void* arg) {
printf("Detached thread running\n");
sleep(2);
printf("Detached thread finishing\n");
pthread_exit(NULL);
}
int main() {
pthread_t thread;
pthread_attr_t attr;
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
pthread_create(&thread, &attr, detached_thread, NULL);
pthread_attr_destroy(&attr);
printf("Main thread continuing...\n");
sleep(3); // Wait to see detached thread output
printf("Main thread exiting\n");
return 0;
}
Thread Cancellation
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
void* cancellable_thread(void* arg) {
int i = 0;
while (1) {
printf("Thread iteration %d\n", ++i);
sleep(1);
pthread_testcancel(); // Cancellation point
}
return NULL;
}
int main() {
pthread_t thread;
pthread_create(&thread, NULL, cancellable_thread, NULL);
sleep(3); // Let thread run for 3 seconds
printf("Cancelling thread...\n");
pthread_cancel(thread);
pthread_join(thread, NULL);
printf("Thread cancelled and joined\n");
return 0;
}
5. Thread Synchronization Primitives
Mutexes
#include <pthread.h>
#include <stdio.h>
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int shared_resource = 0;
void* increment_with_mutex(void* arg) {
for (int i = 0; i < 1000000; i++) {
pthread_mutex_lock(&mutex);
shared_resource++;
pthread_mutex_unlock(&mutex);
}
return NULL;
}
int main() {
pthread_t thread1, thread2;
pthread_create(&thread1, NULL, increment_with_mutex, NULL);
pthread_create(&thread2, NULL, increment_with_mutex, NULL);
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
printf("Final value: %d\n", shared_resource);
pthread_mutex_destroy(&mutex);
return 0;
}
Condition Variables
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
int ready = 0;
void* producer(void* arg) {
pthread_mutex_lock(&mutex);
ready = 1;
printf("Producer: Data is ready\n");
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
return NULL;
}
void* consumer(void* arg) {
pthread_mutex_lock(&mutex);
while (!ready) {
printf("Consumer: Waiting for data\n");
pthread_cond_wait(&cond, &mutex);
}
printf("Consumer: Got data\n");
pthread_mutex_unlock(&mutex);
return NULL;
}
int main() {
pthread_t prod_thread, cons_thread;
pthread_create(&cons_thread, NULL, consumer, NULL);
sleep(1); // Ensure consumer starts first
pthread_create(&prod_thread, NULL, producer, NULL);
pthread_join(prod_thread, NULL);
pthread_join(cons_thread, NULL);
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
return 0;
}
Barriers
#include <pthread.h>
#include <stdio.h>
#define NUM_THREADS 3
pthread_barrier_t barrier;
void* barrier_thread(void* arg) {
int id = *(int*)arg;
printf("Thread %d before barrier\n", id);
pthread_barrier_wait(&barrier);
printf("Thread %d after barrier\n", id);
return NULL;
}
int main() {
pthread_t threads[NUM_THREADS];
int thread_ids[NUM_THREADS];
pthread_barrier_init(&barrier, NULL, NUM_THREADS);
for (int i = 0; i < NUM_THREADS; i++) {
thread_ids[i] = i;
pthread_create(&threads[i], NULL, barrier_thread, &thread_ids[i]);
}
for (int i = 0; i < NUM_THREADS; i++) {
pthread_join(threads[i], NULL);
}
pthread_barrier_destroy(&barrier);
return 0;
}
6. Thread-Local Storage
#include <pthread.h>
#include <stdio.h>
pthread_key_t thread_key;
void cleanup_thread_data(void* data) {
free(data);
}
void* thread_function(void* arg) {
int* data = malloc(sizeof(int));
*data = *(int*)arg;
pthread_setspecific(thread_key, data);
// Access thread-local storage
int* tls_data = pthread_getspecific(thread_key);
printf("Thread %d: TLS value = %d\n", *((int*)arg), *tls_data);
return NULL;
}
int main() {
pthread_t threads[3];
int thread_args[3] = {1, 2, 3};
pthread_key_create(&thread_key, cleanup_thread_data);
for (int i = 0; i < 3; i++) {
pthread_create(&threads[i], NULL, thread_function, &thread_args[i]);
}
for (int i = 0; i < 3; i++) {
pthread_join(threads[i], NULL);
}
pthread_key_delete(thread_key);
return 0;
}
7. Advanced Thread Management
Thread Scheduling
#include <pthread.h>
#include <stdio.h>
#include <sched.h>
void* priority_thread(void* arg) {
int policy;
struct sched_param param;
pthread_getschedparam(pthread_self(), &policy, ¶m);
printf("Thread priority: %d\n", param.sched_priority);
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
struct sched_param param;
pthread_attr_init(&attr);
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
param.sched_priority = 50;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&thread, &attr, priority_thread, NULL);
pthread_join(thread, NULL);
pthread_attr_destroy(&attr);
return 0;
}
8. Complete Implementation Code
Here’s a complete example demonstrating multiple thread management concepts:
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#define NUM_THREADS 5
#define QUEUE_SIZE 10
typedef struct {
int data[QUEUE_SIZE];
int front;
int rear;
pthread_mutex_t mutex;
pthread_cond_t not_full;
pthread_cond_t not_empty;
} thread_safe_queue_t;
thread_safe_queue_t queue = {
.front = 0,
.rear = 0,
.mutex = PTHREAD_MUTEX_INITIALIZER,
.not_full = PTHREAD_COND_INITIALIZER,
.not_empty = PTHREAD_COND_INITIALIZER
};
void queue_init(thread_safe_queue_t* q) {
pthread_mutex_init(&q->mutex, NULL);
pthread_cond_init(&q->not_full, NULL);
pthread_cond_init(&q->not_empty, NULL);
}
void queue_destroy(thread_safe_queue_t* q) {
pthread_mutex_destroy(&q->mutex);
pthread_cond_destroy(&q->not_full);
pthread_cond_destroy(&q->not_empty);
}
void queue_push(thread_safe_queue_t* q, int value) {
pthread_mutex_lock(&q->mutex);
while ((q->rear + 1) % QUEUE_SIZE == q->front) {
pthread_cond_wait(&q->not_full, &q->mutex);
}
q->data[q->rear] = value;
q->rear = (q->rear + 1) % QUEUE_SIZE;
pthread_cond_signal(&q->not_empty);
pthread_mutex_unlock(&q->mutex);
}
int queue_pop(thread_safe_queue_t* q) {
pthread_mutex_lock(&q->mutex);
while (q->front == q->rear) {
pthread_cond_wait(&q->not_empty, &q->mutex);
}
int value = q->data[q->front];
q->front = (q->front + 1) % QUEUE_SIZE;
pthread_cond_signal(&q->not_full);
pthread_mutex_unlock(&q->mutex);
return value;
}
void* producer(void* arg) {
int id = *(int*)arg;
for (int i = 0; i < 5; i++) {
int value = id * 100 + i;
queue_push(&queue, value);
printf("Producer %d: Pushed %d\n", id, value);
sleep(1);
}
return NULL;
}
void* consumer(void* arg) {
int id = *(int*)arg;
for (int i = 0; i < 5; i++) {
int value = queue_pop(&queue);
printf("Consumer %d: Popped %d\n", id, value);
sleep(1);
}
return NULL;
}
int main() {
pthread_t producers[NUM_THREADS];
pthread_t consumers[NUM_THREADS];
int thread_ids[NUM_THREADS];
queue_init(&queue);
for (int i = 0; i < NUM_THREADS; i++) {
thread_ids[i] = i;
pthread_create(&producers[i], NULL, producer, &thread_ids[i]);
pthread_create(&consumers[i],
NULL, consumer, &thread_ids[i]);
}
for (int i = 0; i < NUM_THREADS; i++) {
pthread_join(producers[i], NULL);
pthread_join(consumers[i], NULL);
}
queue_destroy(&queue);
printf("All threads have finished execution\n");
return 0;
}
Explanation of the Code
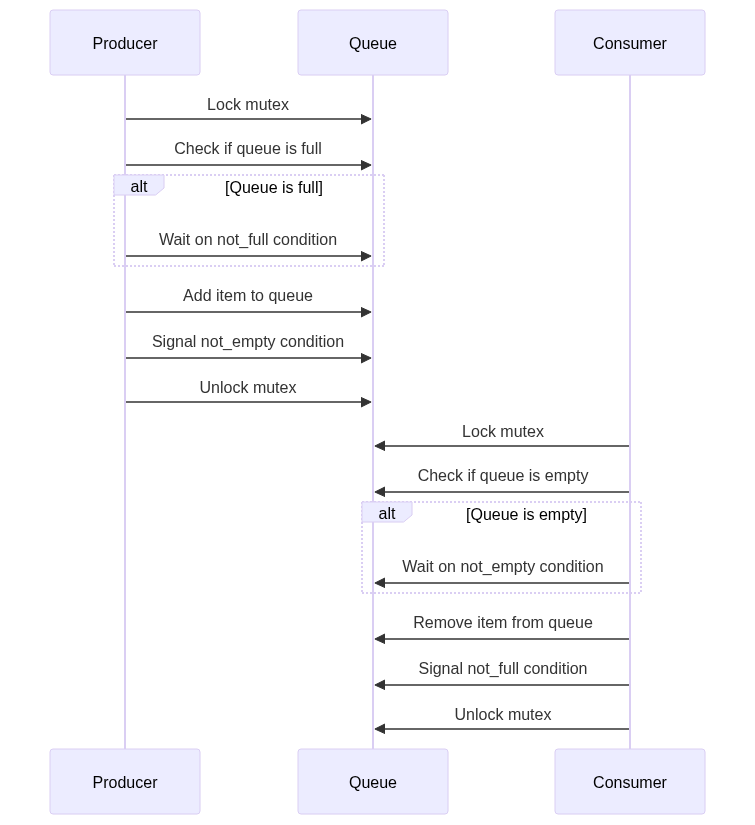
- Thread-safe Queue:
- A circular queue is implemented with mutexes and condition variables to ensure thread-safe access.
queue_pushadds an element to the queue, andqueue_popremoves an element.- The queue uses condition variables to handle cases where the queue is full or empty.
- Producers and Consumers:
- Producers generate data and push it into the queue.
- Consumers retrieve data from the queue and process it.
- Both producers and consumers run concurrently, demonstrating synchronization.
- Thread Management:
- Threads are created for both producers and consumers.
pthread_joinensures that the main thread waits for all threads to complete.
9. Common Pitfalls and Best Practices
Common Pitfalls
- Race Conditions:
- Occur when multiple threads access shared resources without proper synchronization.
- Use mutexes or other synchronization primitives to avoid this.
- Deadlocks:
- Happen when two or more threads wait indefinitely for resources held by each other.
- Avoid circular dependencies and use timeout mechanisms.
- Resource Leaks:
- Forgetting to destroy mutexes, condition variables, or thread-local storage can lead to resource leaks.
- Improper Thread Termination:
- Threads should not be terminated abruptly (e.g., using
pthread_cancel) unless absolutely necessary.
- Threads should not be terminated abruptly (e.g., using
Best Practices
- Minimize Lock Contention:
- Reduce the time a thread holds a lock to improve performance.
- Use fine-grained locking or lock-free data structures where possible.
- Use Thread Pools:
- Instead of creating and destroying threads repeatedly, use a thread pool to reuse threads.
- Avoid Oversubscription:
- Do not create more threads than the number of available CPU cores unless necessary.
- Test for Synchronization Issues:
- Use tools like Valgrind or ThreadSanitizer to detect race conditions and deadlocks.
10. Performance Optimization
Thread Overhead
- Creation and Destruction:
- Creating and destroying threads repeatedly can be expensive.
- Use thread pools to mitigate this overhead.
- Context Switching:
- Frequent context switching between threads can degrade performance.
- Minimize the number of threads and use thread affinity to bind threads to specific CPUs.
Optimizing Synchronization
- Reduce Lock Granularity:
- Use separate locks for different parts of shared data to reduce contention.
- Use Read-Write Locks:
- Use
pthread_rwlockfor scenarios where multiple threads read data but only a few write.
- Use
- Avoid Busy Waiting:
- Use condition variables or semaphores instead of spinning in a loop.
11. Further Reading
- Books:
- “Programming with POSIX Threads” by David R. Butenhof
- “Modern Operating Systems” by Andrew S. Tanenbaum
- Documentation:
- Online Resources:
12. Conclusion
Thread creation and management are essential skills for building efficient, concurrent applications. POSIX Threads (Pthreads) provide a robust API for creating, synchronizing, and managing threads. By understanding thread attributes, synchronization primitives, and best practices, developers can write scalable and performant multithreaded programs. However, care must be taken to avoid common pitfalls like race conditions and deadlocks.
13. References
- Butenhof, D. R. (1997). Programming with POSIX Threads. Addison-Wesley.
- Tanenbaum, A. S. (2014). Modern Operating Systems (4th ed.). Pearson.
- Linux Programmer’s Manual: https://man7.org/linux/man-pages/
- GNU C Library Documentation: https://www.gnu.org/software/libc/manual/html_node/Threads.html
- Intel Threading Building Blocks: https://www.intel.com/content/www/us/en/developer/tools/oneapi/threading-building-blocks.html