Day 42: Resource Allocation Graph Theory
Table of Contents
- Introduction to Resource Allocation Graphs
- Graph Components and Representation
- Deadlock Detection Using RAG
- Deadlock Prevention Strategies
- Cycle Detection Algorithms
- Resource Request Algorithms
- Graph Analysis Tools
- Performance Considerations
- Conclusion
1. Introduction to Resource Allocation Graphs
Resource Allocation Graphs (RAG) are a graphical and mathematical tool used to represent the allocation of resources to processes in a system. They are particularly useful for detecting and preventing deadlocks, which occur when processes are blocked because they are waiting for resources held by other processes.
- Processes: Represented as circles in the graph.
- Resources: Represented as squares in the graph.
- Request Edges: Directed edges from processes to resources, indicating that a process is requesting a resource.
- Assignment Edges: Directed edges from resources to processes, indicating that a resource is currently allocated to a process.
2. Graph Components and Representation
A Resource Allocation Graph can be represented using matrices and data structures in code. Below is an implementation of a basic RAG structure in C:
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#define MAX_PROCESSES 100
#define MAX_RESOURCES 100
typedef struct {
int process_id;
int resource_id;
int instances;
} Edge;
typedef struct {
int num_processes;
int num_resources;
int **allocation_matrix; // Current allocations
int **request_matrix; // Resource requests
int *available_resources; // Available instances
int *max_resources; // Maximum instances
} ResourceGraph;
ResourceGraph* create_resource_graph(int num_processes, int num_resources) {
ResourceGraph *graph = malloc(sizeof(ResourceGraph));
graph->num_processes = num_processes;
graph->num_resources = num_resources;
// Initialize allocation matrix
graph->allocation_matrix = malloc(num_processes * sizeof(int*));
for (int i = 0; i < num_processes; i++) {
graph->allocation_matrix[i] = calloc(num_resources, sizeof(int));
}
// Initialize request matrix
graph->request_matrix = malloc(num_processes * sizeof(int*));
for (int i = 0; i < num_processes; i++) {
graph->request_matrix[i] = calloc(num_resources, sizeof(int));
}
// Initialize resource vectors
graph->available_resources = calloc(num_resources, sizeof(int));
graph->max_resources = calloc(num_resources, sizeof(int));
return graph;
}
3. Deadlock Detection Using RAG
Deadlock detection involves identifying cycles in the Resource Allocation Graph. If a cycle exists, it indicates a deadlock.
Deadlock Detection Algorithm
Below is an implementation of a deadlock detection algorithm:
typedef struct {
bool *marked;
int num_processes;
ResourceGraph *graph;
} DeadlockDetector;
bool is_process_finished(DeadlockDetector *detector, int process_id) {
for (int r = 0; r < detector->graph->num_resources; r++) {
if (detector->graph->request_matrix[process_id][r] >
detector->graph->available_resources[r]) {
return false;
}
}
return true;
}
bool detect_deadlock(ResourceGraph *graph) {
DeadlockDetector detector = {
.marked = calloc(graph->num_processes, sizeof(bool)),
.num_processes = graph->num_processes,
.graph = graph
};
bool progress;
do {
progress = false;
for (int p = 0; p < graph->num_processes; p++) {
if (!detector.marked[p] && is_process_finished(&detector, p)) {
detector.marked[p] = true;
progress = true;
// Release resources
for (int r = 0; r < graph->num_resources; r++) {
graph->available_resources[r] +=
graph->allocation_matrix[p][r];
}
}
}
} while (progress);
// Check for unmarked processes (deadlocked)
bool deadlock = false;
for (int p = 0; p < graph->num_processes; p++) {
if (!detector.marked[p]) {
deadlock = true;
printf("Process %d is deadlocked\n", p);
}
}
free(detector.marked);
return deadlock;
}
4. Deadlock Prevention Strategies
Deadlock prevention involves ensuring that the system never enters a deadlock state by carefully managing resource allocation.
Deadlock Prevention Implementation
Below is an implementation of a deadlock prevention mechanism:
typedef struct {
ResourceGraph *graph;
int *process_priority;
bool *resource_preemptable;
} DeadlockPrevention;
bool can_allocate_safely(DeadlockPrevention *dp,
int process_id,
int resource_id,
int requested_instances) {
// Check if allocation would exceed maximum
if (dp->graph->allocation_matrix[process_id][resource_id] +
requested_instances > dp->graph->max_resources[resource_id]) {
return false;
}
// Check if resources are available
if (dp->graph->available_resources[resource_id] < requested_instances) {
// Try preemption if possible
if (dp->resource_preemptable[resource_id]) {
return try_preemption(dp, process_id, resource_id,
requested_instances);
}
return false;
}
return true;
}
bool allocate_resources(DeadlockPrevention *dp,
int process_id,
int resource_id,
int instances) {
if (!can_allocate_safely(dp, process_id, resource_id, instances)) {
return false;
}
dp->graph->allocation_matrix[process_id][resource_id] += instances;
dp->graph->available_resources[resource_id] -= instances;
return true;
}
5. Cycle Detection Algorithms
Cycle detection is crucial for identifying deadlocks in a Resource Allocation Graph.
Cycle Detection Implementation
Below is an implementation of a cycle detection algorithm:
typedef enum {
WHITE, // Not visited
GRAY, // Being visited
BLACK // Completed
} VertexColor;
typedef struct {
VertexColor *colors;
int *parent;
ResourceGraph *graph;
} CycleDetector;
bool detect_cycle_util(CycleDetector *detector,
int process_id,
int *cycle_start) {
detector->colors[process_id] = GRAY;
// Check all resource requests
for (int r = 0; r < detector->graph->num_resources; r++) {
if (detector->graph->request_matrix[process_id][r] > 0) {
// Find processes holding this resource
for (int p = 0; p < detector->graph->num_processes; p++) {
if (detector->graph->allocation_matrix[p][r] > 0) {
if (detector->colors[p] == GRAY) {
*cycle_start = p;
return true;
}
if (detector->colors[p] == WHITE) {
detector->parent[p] = process_id;
if (detect_cycle_util(detector, p, cycle_start)) {
return true;
}
}
}
}
}
}
detector->colors[process_id] = BLACK;
return false;
}
Explanation of the Code
- CycleDetector Structure: The
CycleDetectorstructure keeps track of vertex colors and parent pointers. - Cycle Detection: The
detect_cycle_util()function uses depth-first search (DFS) to detect cycles in the graph.
6. Resource Request Algorithms
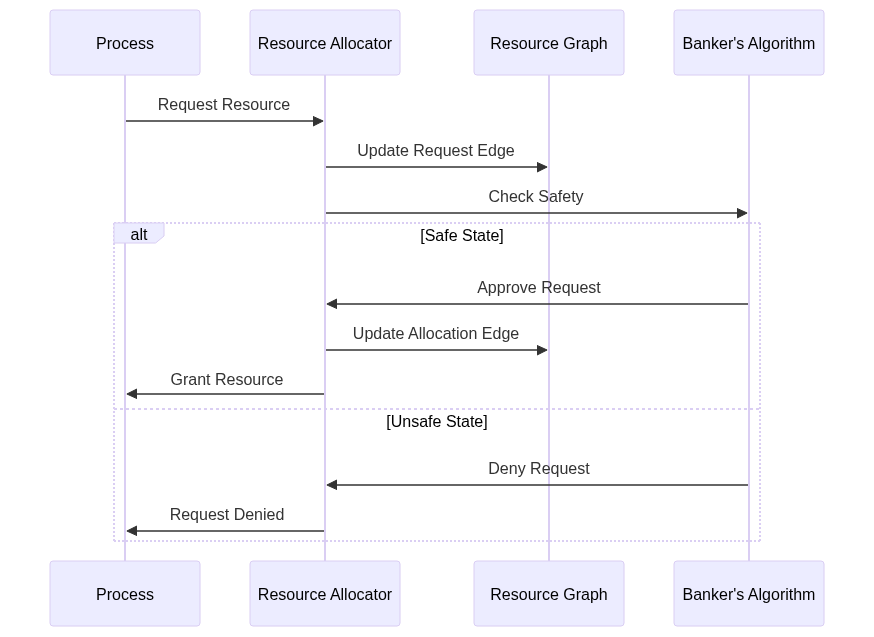
The Banker’s Algorithm is a resource allocation and deadlock avoidance algorithm that ensures the system remains in a safe state.
Banker’s Algorithm Implementation
Below is an implementation of the Banker’s Algorithm:
typedef struct {
int *work;
bool *finish;
int **need;
ResourceGraph *graph;
} BankerAlgorithm;
bool is_safe_state(BankerAlgorithm *banker) {
int num_p = banker->graph->num_processes;
int num_r = banker->graph->num_resources;
// Initialize work and finish arrays
memcpy(banker->work, banker->graph->available_resources,
num_r * sizeof(int));
memset(banker->finish, false, num_p * sizeof(bool));
bool found;
do {
found = false;
for (int p = 0; p < num_p; p++) {
if (!banker->finish[p]) {
bool can_allocate = true;
for (int r = 0; r < num_r; r++) {
if (banker->need[p][r] > banker->work[r]) {
can_allocate = false;
break;
}
}
if (can_allocate) {
for (int r = 0; r < num_r; r++) {
banker->work[r] +=
banker->graph->allocation_matrix[p][r];
}
banker->finish[p] = true;
found = true;
}
}
}
} while (found);
// Check if all processes finished
for (int p = 0; p < num_p; p++) {
if (!banker->finish[p]) return false;
}
return true;
}
7. Graph Analysis Tools
Graph analysis tools help in understanding resource utilization and contention.
Graph Analytics Implementation
Below is an implementation of graph analysis utilities:
typedef struct {
int *resource_utilization;
int *process_waiting_time;
int *resource_contention;
} GraphAnalytics;
void analyze_resource_utilization(ResourceGraph *graph,
GraphAnalytics *analytics) {
for (int r = 0; r < graph->num_resources; r++) {
int allocated = 0;
for (int p = 0; p < graph->num_processes; p++) {
allocated += graph->allocation_matrix[p][r];
}
analytics->resource_utilization[r] =
(allocated * 100) / graph->max_resources[r];
}
}
void analyze_resource_contention(ResourceGraph *graph,
GraphAnalytics *analytics) {
for (int r = 0; r < graph->num_resources; r++) {
int requesters = 0;
for (int p = 0; p < graph->num_processes; p++) {
if (graph->request_matrix[p][r] > 0) {
requesters++;
}
}
analytics->resource_contention[r] = requesters;
}
}
8. Performance Considerations
Key performance metrics for RAG include:
- Graph Analysis Time Complexity: O(P * R) for basic analysis.
- Deadlock Detection Overhead: O(P * R) in the worst case.
- Memory Requirements: O(P * R) for matrix storage.
- Resource Utilization Efficiency: Measures how effectively resources are used.
- System Throughput Impact: Measures the impact of resource allocation on system performance.
9. Conclusion
Resource Allocation Graph Theory provides a powerful framework for understanding and managing resource allocation in operating systems. The visual and mathematical representation helps in detecting and preventing deadlocks while ensuring efficient resource utilization.