Day 66: Designing Advanced Signaling Mechanisms for Real-Time IPC in Modern Operating Systems
Introduction
Advanced Inter-Process Communication (IPC) mechanisms, particularly focusing on advanced signaling techniques, form a crucial part of modern operating systems. This guide explores sophisticated implementations of signal handling, real-time signals, and queue management at the kernel level. Signals are a fundamental IPC mechanism used to notify processes of events, such as exceptions or user-defined events. Advanced signaling extends this concept by introducing real-time signals, priority-based handling, and enhanced security features.
The implementation discussed here focuses on building a robust signaling system capable of handling high-priority real-time signals, managing signal queues efficiently, and ensuring secure cross-process communication. By the end of this guide, you will have a solid understanding of how to design and implement advanced signaling mechanisms suitable for real-time and high-performance applications.
Advanced Signaling Architecture
The architecture of the advanced signaling system is built around several core components. The first is signal queue management, which involves a sophisticated queuing system for handling multiple signals efficiently. The system supports both standard and real-time signals, with priority handling and overflow protection. Real-time signals are given higher priority and are guaranteed to be delivered in a specific order.
Another key component is real-time signal handling. This mechanism ensures that real-time signals are delivered promptly and with minimal latency. The system also supports extended information passing, allowing signals to carry additional data. This is particularly useful for applications that require more than just a simple notification.
Finally, the system includes cross-process synchronization mechanisms. These allow multiple processes to coordinate their actions using signals. The implementation supports process groups and session management, enabling signals to be sent to multiple processes simultaneously.
Simplified Implementation of Advanced Signal System
The implementation begins with defining the rt_signal_queue structure, which manages the queue of real-time signals. This structure includes a spinlock for synchronization, a list of queued signals, and a wait queue for blocking processes.
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/signal.h>
#include <linux/sched.h>
#include <linux/pid.h>
#include <linux/spinlock.h>
#include <linux/list.h>
#include <linux/slab.h>
#define MAX_RT_SIGQUEUE_SIZE 32
#define SIGNAL_PAYLOAD_SIZE 128
struct rt_signal_queue {
spinlock_t lock;
struct list_head queue;
unsigned int count;
unsigned int max_count;
wait_queue_head_t wait;
};
struct signal_payload {
int signo;
pid_t sender_pid;
uid_t sender_uid;
void *data;
size_t data_size;
unsigned long timestamp;
};
struct advanced_signal {
struct list_head list;
struct signal_payload payload;
int priority;
bool is_realtime;
};
struct process_signal_context {
struct rt_signal_queue rt_queue;
struct task_struct *task;
atomic_t pending_signals;
spinlock_t context_lock;
struct list_head handlers;
};
The init_signal_context function initializes the signal context for a process. It sets up the real-time signal queue, initializes the spinlocks, and prepares the list of signal handlers.
static int init_signal_context(struct process_signal_context *ctx)
{
spin_lock_init(&ctx->rt_queue.lock);
INIT_LIST_HEAD(&ctx->rt_queue.queue);
init_waitqueue_head(&ctx->rt_queue.wait);
ctx->rt_queue.count = 0;
ctx->rt_queue.max_count = MAX_RT_SIGQUEUE_SIZE;
spin_lock_init(&ctx->context_lock);
INIT_LIST_HEAD(&ctx->handlers);
atomic_set(&ctx->pending_signals, 0);
return 0;
}
The queue_rt_signal function queues a real-time signal. It allocates memory for the signal, copies the payload, and adds the signal to the queue. If the queue is full, the function returns an error.
static int queue_rt_signal(struct process_signal_context *ctx,
struct signal_payload *payload,
int priority)
{
struct advanced_signal *sig;
unsigned long flags;
sig = kmalloc(sizeof(*sig), GFP_ATOMIC);
if (!sig)
return -ENOMEM;
memcpy(&sig->payload, payload, sizeof(*payload));
sig->priority = priority;
sig->is_realtime = true;
spin_lock_irqsave(&ctx->rt_queue.lock, flags);
if (ctx->rt_queue.count >= ctx->rt_queue.max_count) {
spin_unlock_irqrestore(&ctx->rt_queue.lock, flags);
kfree(sig);
return -EAGAIN;
}
list_add_tail(&sig->list, &ctx->rt_queue.queue);
ctx->rt_queue.count++;
atomic_inc(&ctx->pending_signals);
spin_unlock_irqrestore(&ctx->rt_queue.lock, flags);
wake_up(&ctx->rt_queue.wait);
return 0;
}
Signal Handler Implementation
The signal_handler structure defines a signal handler, which includes a function pointer to the handler, the signal number, and flags. The register_signal_handler function registers a signal handler for a specific signal.
struct signal_handler {
struct list_head list;
void (*handler)(struct signal_payload *);
int signo;
unsigned long flags;
};
static int register_signal_handler(struct process_signal_context *ctx,
int signo,
void (*handler)(struct signal_payload *),
unsigned long flags)
{
struct signal_handler *sh;
unsigned long irqflags;
sh = kmalloc(sizeof(*sh), GFP_KERNEL);
if (!sh)
return -ENOMEM;
sh->handler = handler;
sh->signo = signo;
sh->flags = flags;
spin_lock_irqsave(&ctx->context_lock, irqflags);
list_add(&sh->list, &ctx->handlers);
spin_unlock_irqrestore(&ctx->context_lock, irqflags);
return 0;
}
The process_signal_queue function processes the signal queue. It iterates over the queued signals and invokes the appropriate handler for each signal.
static void process_signal_queue(struct process_signal_context *ctx)
{
struct advanced_signal *sig, *tmp;
struct signal_handler *handler;
unsigned long flags;
spin_lock_irqsave(&ctx->rt_queue.lock, flags);
list_for_each_entry_safe(sig, tmp, &ctx->rt_queue.queue, list) {
list_for_each_entry(handler, &ctx->handlers, list) {
if (handler->signo == sig->payload.signo) {
handler->handler(&sig->payload);
list_del(&sig->list);
ctx->rt_queue.count--;
atomic_dec(&ctx->pending_signals);
kfree(sig);
break;
}
}
}
spin_unlock_irqrestore(&ctx->rt_queue.lock, flags);
}
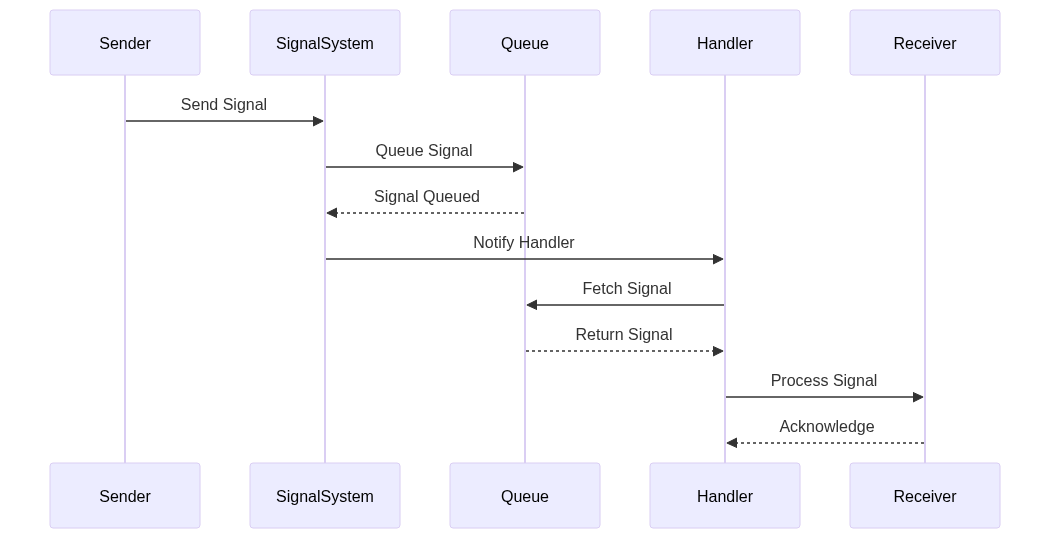
Signal Flow Architecture
The signal flow architecture is illustrated using a sequence diagram. The diagram shows the interaction between the sender, signal system, queue, handler, and receiver.
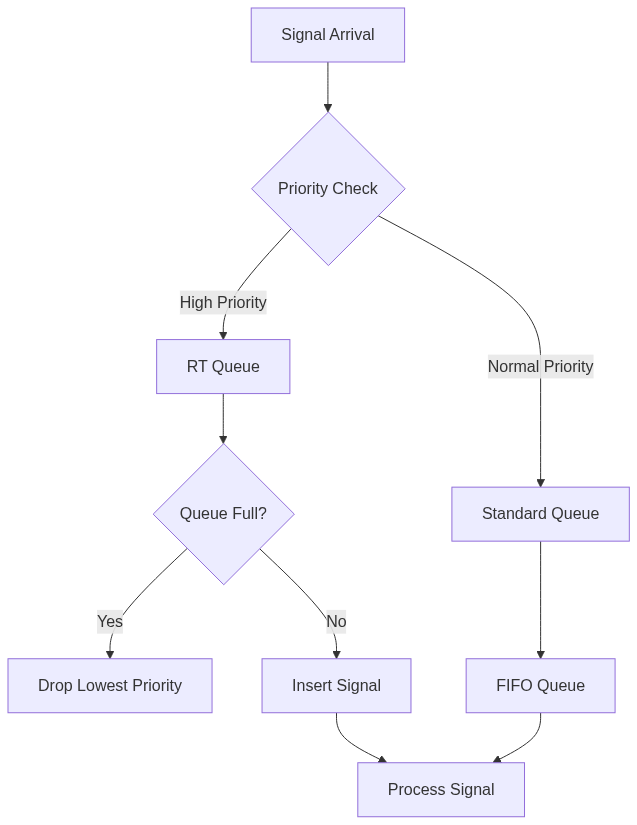
Real-time Priority Management
The real-time priority management system ensures that high-priority signals are processed before lower-priority signals. The following graph illustrates the flow of signal processing based on priority.
Signal Delivery Implementation
The signal_delivery_context structure tracks the delivery of signals. The deliver_signal function delivers a signal to the target process.
struct signal_delivery_context {
atomic_t delivery_count;
struct timespec64 last_delivery;
unsigned long flags;
};
static int deliver_signal(struct process_signal_context *ctx,
struct signal_payload *payload)
{
struct signal_delivery_context *delivery_ctx;
int ret;
delivery_ctx = kmalloc(sizeof(*delivery_ctx), GFP_KERNEL);
if (!delivery_ctx)
return -ENOMEM;
atomic_set(&delivery_ctx->delivery_count, 0);
ktime_get_real_ts64(&delivery_ctx->last_delivery);
ret = queue_rt_signal(ctx, payload, SIGRT_PRIORITY_DEFAULT);
if (ret < 0) {
kfree(delivery_ctx);
return ret;
}
atomic_inc(&delivery_ctx->delivery_count);
return 0;
}
Performance Monitoring
The signal_metrics structure tracks performance metrics, such as the number of signals sent and received, queue overflows, and processing time.
struct signal_metrics {
atomic64_t signals_sent;
atomic64_t signals_received;
atomic64_t queue_overflows;
atomic64_t processing_time_ns;
struct {
atomic_t count;
atomic64_t total_latency;
} priority_levels[MAX_RT_PRIORITY];
};
static struct signal_metrics metrics;
static void update_signal_metrics(struct signal_payload *payload,
unsigned long processing_time)
{
atomic64_inc(&metrics.signals_received);
atomic64_add(processing_time, &metrics.processing_time_ns);
}
Security Implementation
The verify_signal_permissions function ensures that a process has the necessary permissions to send a signal to another process.
static int verify_signal_permissions(struct task_struct *sender,
struct task_struct *receiver,
int signo)
{
const struct cred *cred = current_cred();
if (!capable(CAP_KILL) &&
!same_thread_group(sender, receiver) &&
!has_permission(sender, receiver, signo)) {
return -EPERM;
}
return 0;
}
Conclusion
Advanced IPC mechanisms, particularly signal handling, require careful implementation to ensure reliable, secure, and efficient communication between processes. The provided implementation demonstrates practical approaches to building a robust signaling system suitable for real-time applications.